Модель: PID
Библиотека: Signals
Имя на уровне решателя: TSIG13
Аннотация: Модель PID регулятора
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
Сигнальный входной порт |
2 |
Port2 |
base.DOF1 |
Сигнальный выходной порт |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
Kd |
base.real |
Коэффициент дифференцирования сигнала |
1 |
2 |
Ki |
base.real |
Коэффициент усиления интеграла сигнала |
1 |
3 |
Kp |
base.real |
Коэффициент линейного усиления |
1 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
PID
Модуль тестируемого компонента
Signals
Дата тестирования
Thu Mar 12 18:39:36 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Модель PID-регулятора.
PID-регулятор — это механизм обратной связи, который автоматически подбирает управляющее воздействие,
чтобы удерживать параметр на заданном уровне.
Он делает это на основе трех простых критериев:
Kp - Коэффициент линейного усиления (Пропорциональная составляющая)
Ki - Коэффициент усиления интеграла сигнала (Интегрирующая составляющая)
Kd - Коэффициент дифференцирования сигнала (Дифференцирующая составляющая)
Складывая эти три составляющие, регулятор точно и стабильно возвращает систему к нужному значению, компенсируя возмущения.
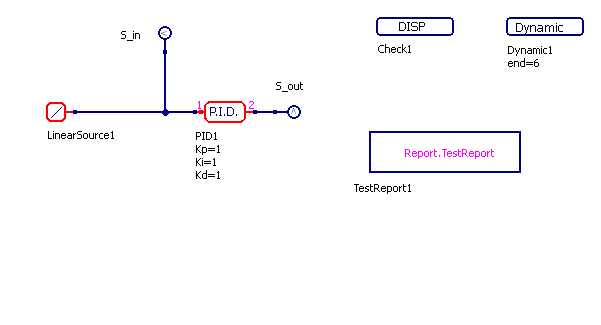
Рисунок 1 - Схема теста
Глава 3. Графики результатов теста
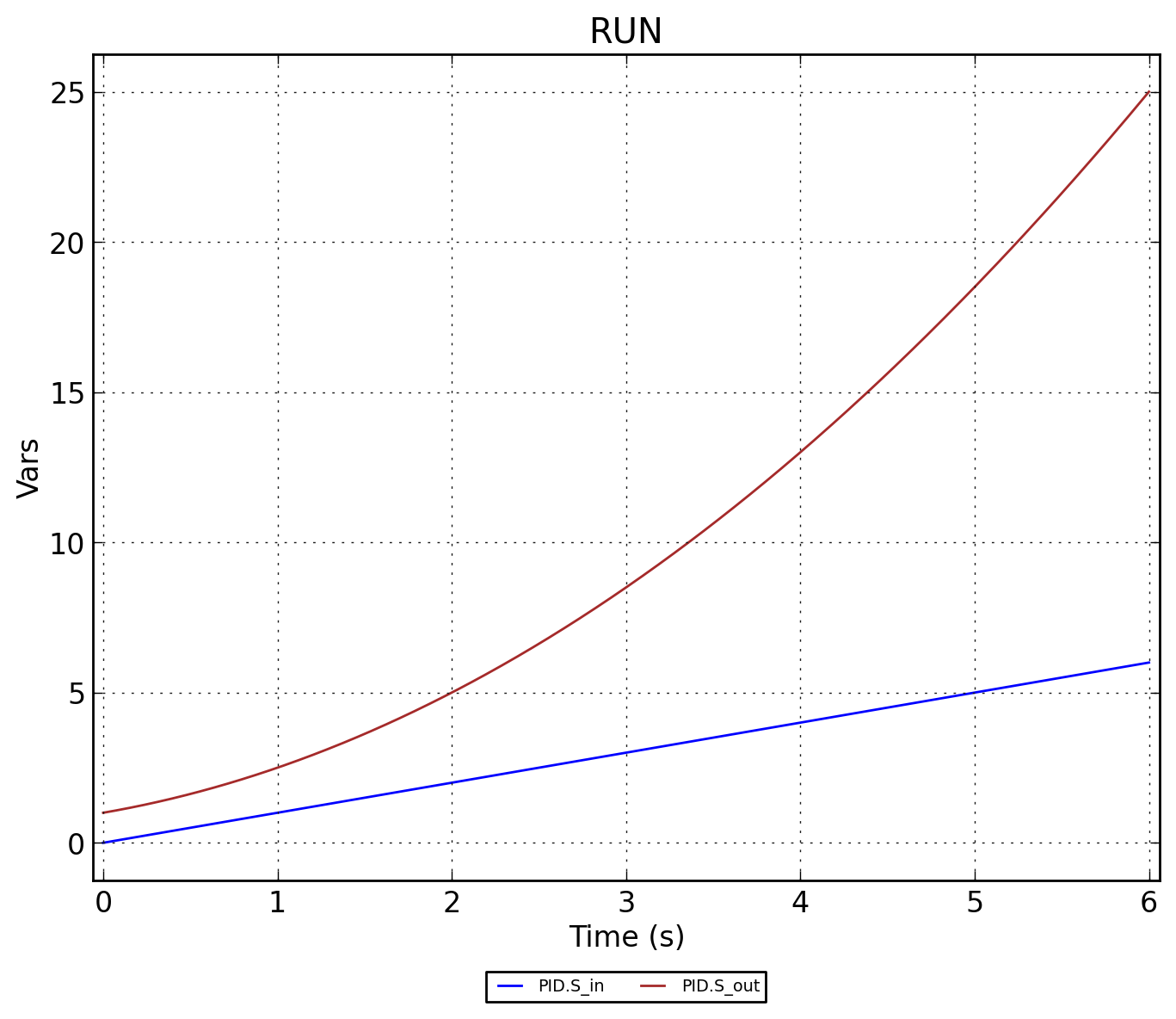
Рисунок 2 - PID.RUN
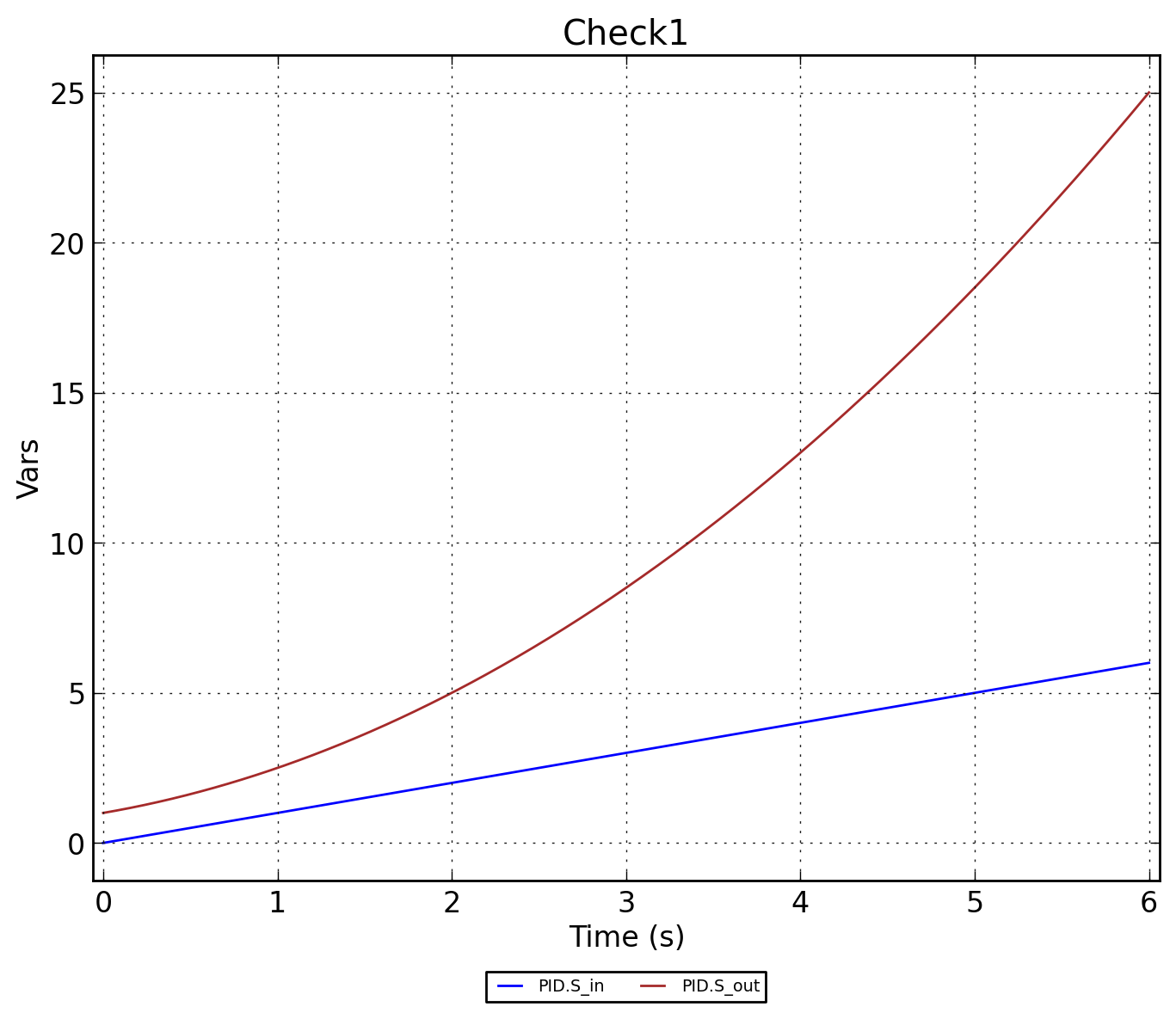
Рисунок 3 - PID.Check1